| Services - tools - models - for embedded software development |
|---|
| Services - tools - models - for embedded software development |
|---|

 |  | |
The examples in this chapter can be distilled to some simple guidelines for obtaining the fastest possible models
Build new code so it does not generate Verilator warnings.
Most warnings can be ignored in known good legacy code. However
UNOPTFLAT (and UNOPT, which was not encountered here) should be
addressed, since they will lead to performance gains.
Use -O1 or -Os for simple C++
optimization, or where build time is onerous. For maximum speed
using -O3 with profiling.
Profile the generated model using gprof to identify any performance bottlenecks in the Verilog.
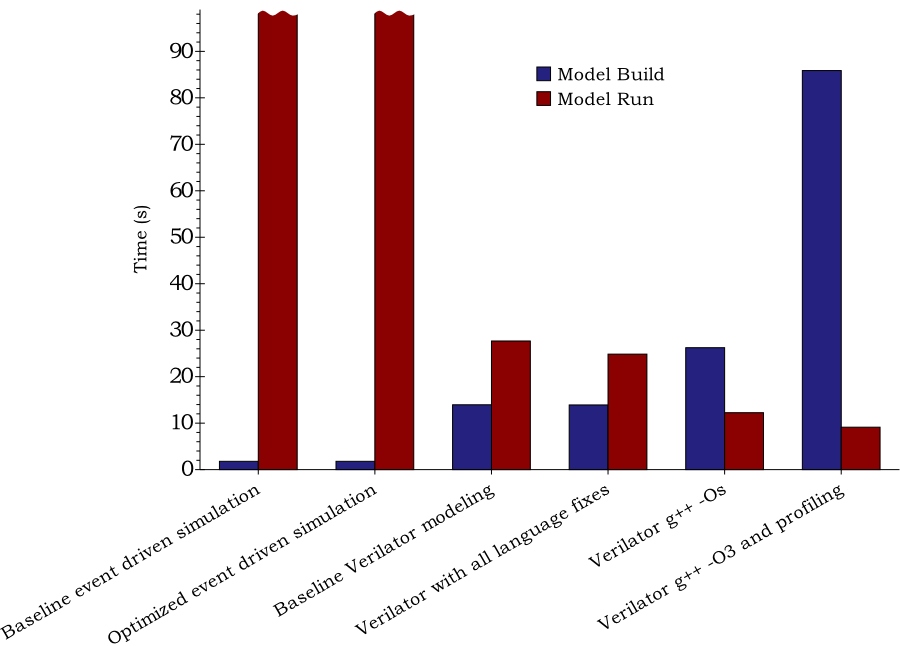
There is a trade off between increased time taken to create the model and reduced execution times of the resulting model. Key data points from the various optimization steps are summarized in Table 7.6.
|
Run Description |
Build Time |
Run Time |
Performance |
|---|---|---|---|
|
Baseline event driven simulation |
1.78 s |
796.84 s |
1.48 kHz |
|
Optimized event driven simulation |
1.78 s |
803.39 s |
1.47 kHz |
|
Baseline Verilator model |
13.94 s |
27.67 s |
42.66 kHz |
|
Verilator with all language fixes |
13.91 s |
24.85 s |
47.49 kHz |
|
Verilator |
26.23 s |
12.24 s |
96.41 kHz |
|
Verilator |
85.87 s |
9.13 s |
129.28 kHz |
Table 7.6. Summary of ORPSoC model performance with various optimizations.
These results are shown graphically in Figure 7.2.
| |  | |
| 7.4. Profiling the Completed Model |  | Chapter 8. Summary |